Positioning and gnss navigating the long and winding road
This article is from the CW Journal archive.
Many people still remember driving cars half a planet from home with a map on their lap and a frown on their face while searching for a phone booth to let a customer know they would be late for an appointment.
That has changed with what the world calls GPS, the American flavour of what is better refered to as GNSS (Global Navigation Satellite System).
On numerous occasions over the last couple of decades I have found myself explaining what a GNSS research and development professional could possibly be doing. "After all, GNSS has been around for decades. Aren't the problems all solved? It should be a done deal."
Of course, the GPS system itself has evolved and new GNSS constellations have arrived. New signals frequently become available but this is only a small part of what GNSS research and development is about. There are also new applications every day with new requirements, and this is part of the story. But, perhaps the major factor in the evolution of GNSS-based user equipment is the continuous ramp-up of expectations for higher accuracy, lower power consumption, smaller size, lower cost, and higher integrity.
My first GPS unit was a five-channel receiver designed in the late 1980s or early 1990s at Auspace. The first prototype consisted of six double-height Eurocard boards in a 19-inch subrack, which we carted from our office in Canberra, Australia, to demonstrate to our parent company in Portsmouth, UK. Very successful demonstrations were conducted with the prototype receiver on the back seat of a rented car using a modem to transmit to base via a massive analogue car-phone.
Fitness Watch
Improvements in the constellations and sensitivity of chipsets mean that a £150 watch is not only smaller and cheaper than GNSS systems of old, it works better.
The first OEM module I sold at SigNav in 1994 consisted of a pair of credit-card-sized boards plugged together, each crammed with components on both sides, including a semi-custom correlator ASIC and two analogue ASICs. The project was a train radio system and the GPS was used to determine when to switch base stations, as well as for tracking the train. A year later this idea was adopted in a sophisticated trunked radio system used to automate the dispatch of a fleet of over 4,000 taxis.
The taxi system demanded 20-metre accuracy for 95% of locations throughout Sydney, Australia, including deep within the urban canyons. For that we needed 'dead reckoning' or inertial aiding. Eventually, despite the high cost, we chose a $600 single-axis gyro. Because Sydney is very hilly, we supplemented it with an accelerometer used as a tilt sensor and a temperature sensor for compensating both devices. By then, commercial GPS chipsets had become a reality and we were forced to abandon our own ASICs in order to benefit from the economies of scale enjoyed by the custom chipset manufacturers.
By the late 1990s, every taxi system in Australia was using GPS, as were couriers and emergency vehicles. Australia, with its unusually large taxi fleets, was in the vanguard of this development, the same was true in Singapore, Shanghai, London and, increasingly, around the USA. Chipsets had become more integrated with, typically, 12 channels in the correlators, and correlators and processors integrated into 'baseband' chips.
By the late 1990s every taxi system in Australia was using gps
In the early 2000s, the long-anticipated E911 mandate in the US began requiring wireless phone operators to report the locations of handsets that were making emergency calls. The mooted specifications required a report within 20 seconds at a defined accuracy and this was the catalyst for a frenzy of R&D around the world, including in my far-flung corner. Activity was fairly evenly divided between R&D in network-based positioning using the cellular signals and GNSS-based positioning in the handset.
In the latter case, the application called for a fast time-to-first-fix (TTFF) and high sensitivity because it was anticipated the mandate would apply to indoor locations as well as outdoor. The result was massive 'acquisition engines' to reduce the TTFF and the advent of more sophisticated signal processing techniques. To reduce TTFF still further, the GPS receiver was assisted by an initial position estimate, with the current time and with known information on the structure of the incoming satellite signals. To make this cost-effective and to take advantage of cellular handset volumes in the hundreds of millions, manufacturers embraced more-optimised semiconductor manufacturing processes and crammed even more into their chipsets.
Another factor in the race to high sensitivity was the emergence of femtocells. The potential market for a base station in every second home lured some of us in the business of GPS-based timing for base stations into throwing significant research and development efforts to achieve ridiculous sensitivities with minimal assistance in terms of time or location. This was needed to guarantee that femtocells conformed to their licensing boundaries and to meet E911 requirements.
SigNav, with a customized chip, also adapted the GPS receiver's frequency plan to allow it to use the same oscillator frequency as many femtocells, and GPS-disciplined the oscillator coherently with the one-pulse-per-second timing output. Unfortunately, the small-cell market has not lived up to the promises of the mid-2010s, even up to now, but the interesting technology it spawned has followed me to u-blox, where it is still in our GNSS receivers today.
|
GET INVOLVED WITH THE CW JOURNAL & OTHER CW ACTIVITIES |
While this was happening, the Russian Glonass satellite system improved the reliability and completeness of its constellation. The disadvantage of it being a frequency division multiple access (FDMA) system was overcome by advances in the GNSS chips which, by the early 2010s, were mixed-signal chips incorporating RF and baseband. As a result, 2011 saw the advent of multi-GNSS chips for the mass market. It became clear that doubling the number of satellites significantly improved geometries in cluttered urban environments, statistically reducing the positioning errors by almost a factor of two. This was a revelation to many of us.
As inertial sensors became much smaller and less expensive, six degrees-of-freedom (6DoF) inertial measurement units (IMUs), incorporating three orthogonal gyros and three orthogonal accelerometers, became readily available at price points compatible with first-mount and after-market automotive applications. Such devices facilitate tightly-coupled three dimensional GNSS inertial navigation system (INS) positioning in tunnels, or deep in urban canyons. Combined with Multi-GNSS in GNSS/INS modules they provide automotive accuracies of a few metres almost anywhere.
Manufacturers embraced semiconductor manufacturing processes to cram more into their chipsets
In a distant part of the GNSS ecosystem away from me, geodesists have been using GPS signals since the 1980s for 'high precision' positioning. These geodetic receivers use the carrier phase for ranging rather than the codephase, yielding much more precise measurements and hence far more precise positioning. Positioning at the centimetre level is the norm.
Carrier phase is, of course, ambiguous. We may know the phase but to turn that into precise range we need to know how many wavelengths there are between the transmit and receive antennas. In geodetic receivers, the integer carrier ambiguities are resolved using elegant mathematical techniques, the most prevalent of which is called the Lambda method. However, in order to resolve the ambiguities, it is necessary to converge the position as far as possible using the standard code pseudorange measurements – and this called for more magic.

In order to achieve such precision, differential techniques were developed. Double-differenced measurements were used in which the observables are differenced between satellites and between receivers, with one of the receivers being the reference receiver at a precisely known location. This process eliminates all of the common errors including the satellite code, carrier and clock biases, and the receiver biases.
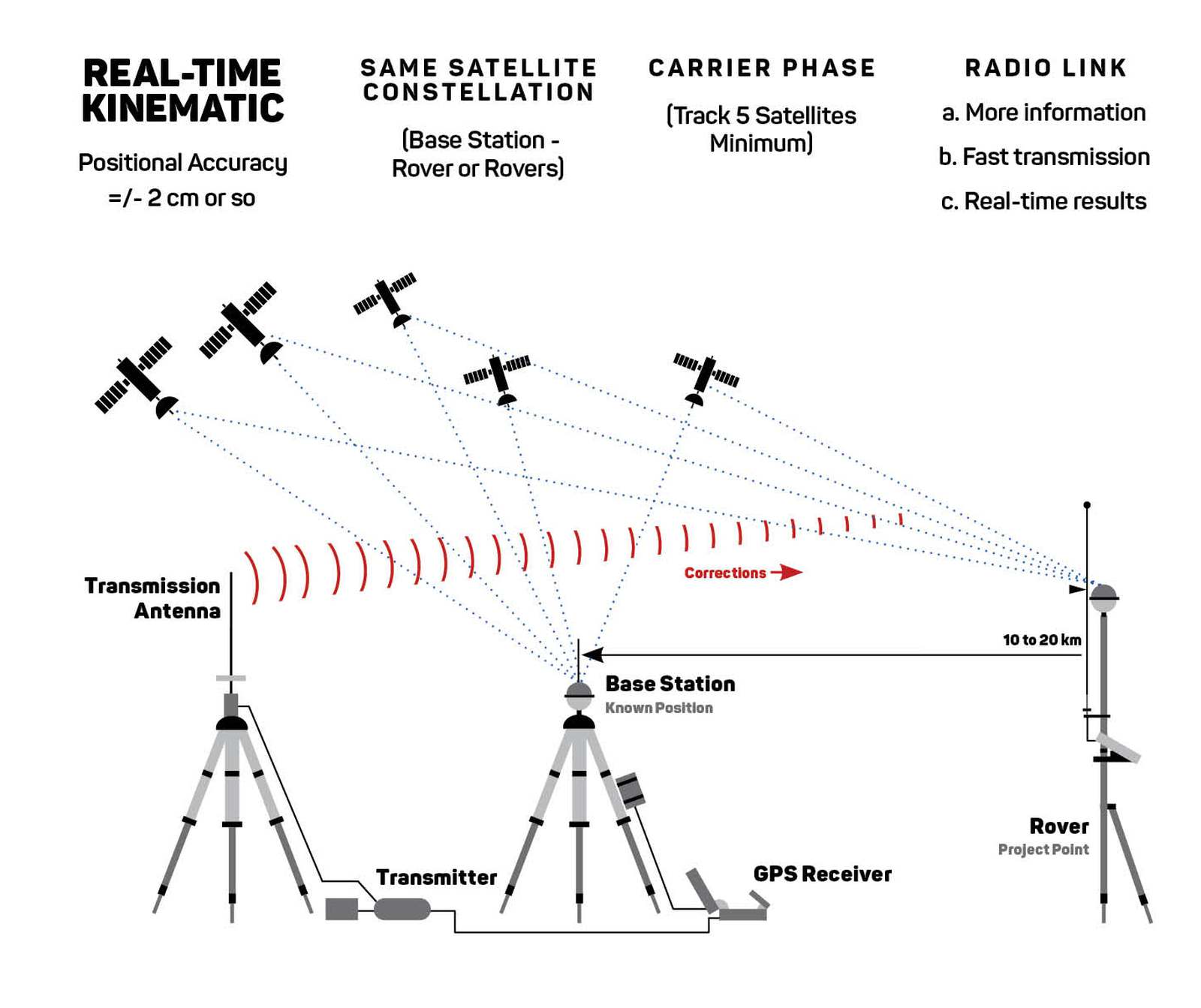
These geodetic techniques were pioneered for static positioning but later refined for Real-Time Kinematic (RTK) applications for moving platforms, but they have the drawback that a reference receiver is required at a fixed location. The further away the rover is from the reference, the longer it takes to converge the position solution until eventually it will not converge at all. The reason being that the ionospheric errors are not common to both receivers unless they are close together. Virtual reference techniques were developed to help overcome the problem by allowing rovers to use a network of reference stations while receiving the reference observables from a single server.
Dual-band geodetic receivers were developed to allow these ionospheric errors to be eliminated without having to use a Virtual Reference Station (VRS). The wave propagation speed through the ionosphere depends on the frequency. As a result it turns out that the code and carrier delays are both affected but in opposite ways – the code is delayed while the carrier phase is advanced. The ionospheric delay can thus be estimated using the difference in pseudorange between two bands. Alternatively, a linear combination of code and carrier observables can be used to eliminate the ionospheric delay.
Such receivers still need to eliminate the satellite code and carrier biases. To do so without differencing with the reference receiver, Precise Point Positioning (PPP) services were set up. These transmit to the rovers the code, carrier and clock biases for each satellite. These services can be global, thereby placing no restrictions on the location or movement of the rovers.
Today, dual-band high precision techniques are being adopted by mass market receiver vendors in order to deliver, among other things, lane-accurate GNSS-based positioning on urban highways for navigation, Advanced Driver Assistance Systems (ADAS), and autonomous vehicles. But there is a twist – PPP receivers are very slow to converge and reconverge, while automotive receivers must reconverge almost instantly after carrier phase interruptions caused by overpasses, trees and buildings. The solution is what is variously known as PPP-RTK or State Space Representation (SSR) correction services. These will transmit over large regions the parameters of sophisticated ionospheric models along with the normal PPP corrections thereby facilitating fast convergence and reconvergence for dual-band receivers.
In yet another distant corner of the ecosystem, and a long time ago, aviation receiver manufacturers and their academic advisers worked with governments and the civil aviation industry to solve the problem of GNSS integrity. Essentially, what was required was for the receiver to nominate an upper bound on its positioning error. This would allow an aircraft or its pilot to make a decision as to whether or not GNSS could be relied upon in any given circumstance. If not, then other sources of position estimates would have to be used along with larger margins for error.
The solution that emerged for adoption was the Integrity Risk (IR). This is the very low probability (typically 10-6/hr) that the GNSS position estimate is outside the Protection Level (PL) reported by the GNSS receiver. It is necessary that this IR value is met by the receiver in order for the receiver to be relied upon. The PL is then compared to the Alarm Limit (AL) for any given circumstance and if it is less the receiver can be trusted. Receiver Autonomous Integrity Monitoring (RAIM) techniques were developed for identifying and eliminating outliers in the measurement errors and for putting a PL on the remaining positioning error in this way.
For safety-critical mass market applications, for example autonomous vehicles, the same requirements are now being placed on receiver manufacturers but the problems are different. The alarm limits are much smaller and the environment is far less benign. Multipath is the main source of errors rather than rare satellite errors. Multipath gives rise to non-stationary, non-Gaussian nominal measurement error distributions with outliers far more frequent and far more difficult to distinguish from the nominal errors. Multiple measurement outliers can also occur simultaneously. Nevertheless, solutions are being found to this, yet one more challenge for the GNSS R&D professional and, again in u-blox, there is an aging Aussie in the thick of it.
Future challenges will come from safety-critical drone applications in congested urban areas. The constraints that apply in the automotive world (cars can't move vertically or directly sideways) do not apply for drones, reducing the effectiveness of the inertials. As for the automotive applications, they will move deeper into urban canyons.
Hybrid positioning will extend beyond inertials to terrestrial ranging and vision. Antenna beamforming may become commonplace to mitigate multipath, jamming and spoofing. Inertials assist in spoofing detection. High-accuracy techniques will be applied to timing receivers needed achieve the timing accuracy required for 5G.
beamforming is likely to be used to mitigate multipath, jamming and spoofing.
As we proceed from challenge to challenge, GNSS-based positioning is coming ever-closer to ubiquity. The transition into safety-critical mass market applications represents an important threshold that we are crossing at this moment – and we have to get it right. Apart from the integrity challenge already discussed, there is the danger presented by the vulnerability of GNSS to jamming and spoofing.
Some of the ways these security threats may be tackled have been mentioned above but other dimensions may be needed in the solution. Message authentication is already being introduced in Galileo but signal authentication for civil signals will be needed for really foolproof security. Undoubtedly, this will emerge in due course and perhaps governments will also commit to back-up infrastructure, which may be the key to the future security of critical infrastructure and safety-critical positioning technology.
Yet another challenge to be met is the lack of SSR services and the need for PPP services at a price point compatible with mass market deployment. Like-minded companies in the GNSS and automotive industry have joined together to set up a new type of service provider, Sapcorda, specifically offering SSR services globally to the mass market. This is a joint venture between u-blox, Bosch, Geo++ and Mitsubishi Electric.
Ironically, the success of GNSS means that its vulnerabilities have become a concern to governments around the world. Improved mitigation for jamming and spoofing will help to alleviate these concerns but, ultimately, backup services will be needed. Backups will reduce our reliance on GNSS and may ultimately bring about a decline in support for it. Luckily, for this author at least, that day is decades away and may never come. New generations of GNSS research and development professionals will probably find ways to keep evolving the technology along a never-ending, long and winding road.
|
GET CW JOURNAL ARTICLES STRAIGHT TO YOUR INBOX Subscribe now |
Senior Director, Technology, Positioning at u-blox